How does navigation on Mars work?
How does the rover move on the surface of Mars and how does it navigate?

The MER Opportunity rover at the rim of Victoria Crater on Mars. This image is a visualization – the rover itself was digitally inserted into an actual photo from Mars because that’s not how “someone” on Mars should take a picture of it. Image credit: NASA/JPL-Caltech.
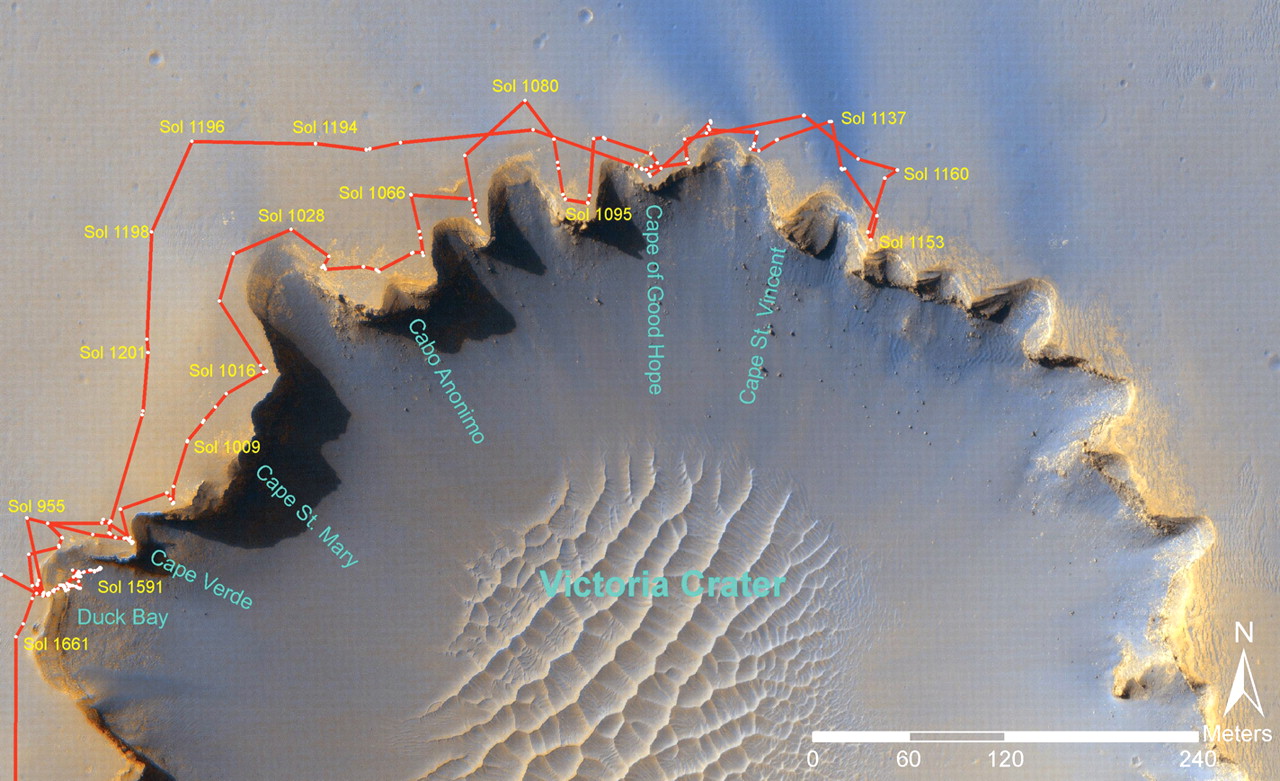
Image of the Victoria crater on Mars from the MRO orbiter. The movement of the rover along the edge of the crater in individual Martian days of the mission (Sol) is plotted in red. Image credit: NASA/JPL-Caltech; Processing: [1].
It really can’t be done that way. And what about controlling the rover using television cameras, as it used to be done when controlling the famous Lunar Rovers on the moon? I will disappoint you, this will not help either. Because if you send a signal to the rover on the moon to turn “to the right”, it will receive that signal in approx. 1.2 seconds and the confirming signal will be returned to the control center after performing the maneuver + approx. 1.2 seconds. Of course, provided that the rover works on the far side of the Moon from the Earth. So it’s quite possible with the moon. But with the planet Mars, it’s a bit “crazy”.
Mars is a planet that moves in an orbit around the Sun, just like Earth. Of course, it is in a different orbit, more distant than the Earth (towards the Sun). Earth and Mars are not permanently at the same direct distance, so their mutual distance is constantly changing. However, it does not mean that it changes somehow “radically” within minutes, but this difference is already noticeable within days. In addition, if we operate a surface rover, it is located somewhere on Mars, but its “visibility” from Earth is never constant, because the planet Mars rotates, just like our Earth. Are you confused enough? Don’t worry, we’ll work it out a little more. To make matters worse, the orbits of Mars and the Earth around the Sun are not exact circles, but ellipses, i.e. the distances and mutual positions of both planets are always precisely predictable – i.e. “predictable” – but you know from these facts alone probably imagine that it probably won’t be that easy.
Okay, so we know how it is with the movement and relative position of the Earth and Mars. From these facts, we can determine that the radio signal itself sent from Earth to Mars will travel between 5 and 22 minutes. Depending on how far Mars is from Earth. For a simple example, it is customary to use the average “travel” time of a radio signal from Earth to Mars, around 13 minutes. It is really only “for example” and for maximum simplification to explain the issue. So, 13 min from Earth (from the control center) to Mars + the time needed for the rover to understand what we want from it and to start performing the maneuver + 13 min from Mars to Earth (to the control center, so that we know that the maneuver therefore performs). Well, we’re home. We think that “great, the rover is going to the right”, but in the meantime, the rover got stuck or overturned (take your pick). Mission over… Let’s quickly come up with an excuse for the media (taxpayers). That would be a bit “a problem”, what do you say?
So it cannot and does not work like this in the case of Mars. The movement of the rover and its route on the surface is programmed in advance, a complex system for navigation and orientation is used, and everything is checked in detail. In some cases, the system of commands from the Earth is really used, especially in the case of the existence of extreme risk – for example, the survey of a very close terrain obstacle. Simply described like this – the rover itself moves very slowly (yes, a very impatient person can be beaten by watching it), so let’s give it 5 minutes to go around some obstacles. So let’s count the time of reception of the signal by the rover, the maneuver of the rover itself, and the time of reception of the signal on Earth, and we have 31 minutes in total. This description is very simplified. I will not mention here other factors that will “stretch” this process in time – the time of data processing on Earth, sending the command through the radio network on Earth to the most suitable antenna on Earth (Deep Space Network, more on that sometime next time) and using it to broadcast towards Mars, various interference, effects of the ionosphere of Mars, Earth, etc. In this way, however, the MER Opportunity (rover) was once saved when it got stuck in loose terrain. At that time, however, there was no other option, either the rover would remain stuck, or it would “try” and succeed.
But how do the navigation and movement of much larger probes (rovers) take place? When we compare MER Opportunity (or its twin MER Spirit) with MSL Curiosity or Mars 2020 Perseverance, the first thing that comes to our mind is that if it can “stuck” Opportunity, which is about the size of a large piece of furniture, how will such Curiosity turn out? or Perseverances that are the size of a passenger car? Yes, the risk when moving a rover weighing almost 1 ton in unexplored terrain full of traps will probably be quite high. Not to mention the total cost of such a rover and the scientific value of such a mission.

Rover size comparison (left to right): Opportunity/Spirit, Sojourner, Curiosity/Perseverance. To give you a better idea, Curiosity (far right) is about 2.2 m high, 3 m long, and 2.7 m wide (about the size of a car). Image credit: NASA/JPL-Caltech.
Precisely for these reasons, a complex navigation system with artificial intelligence is applied to these types of mobile rovers. This system uses not only elements of inertial navigation, and complex data of the scanned surrounding terrain, but also a separate navigation system based on artificial intelligence (AutoNav). The animation below will serve as an illustration:
This computer animation shows, for example, a telemetry recording from the Perseverance rover (NASA), during the first use of the AutoNav system – an automatic navigation function that allows the rover to avoid, for example, rocks and other obstacles without the intervention of the control center from Earth. In the above animation, the Perseverance rover’s movement is accelerated up to 50 times, in reality, the Perseverance rover traveled only 31 m and it took 45 minutes.
The terrain itself is created from height maps, and the rover moves in the surrounding terrain exactly according to these maps. A detailed digital map is gradually created from stereo images obtained from the rover’s navigation cameras. The automatic navigation system uses a height map to evaluate possible routes, especially from the point of view of safety. Trajectories are represented by arcs emanating from the front of the rover. Different colored arcs indicate different hazard assessment results:
- Blue – shows a route where the terrain can cause the undercarriage wheels to drop (the rover can “fit in”).
- Pink – shows a route where the terrain, in terms of its height, may cause the rover to become stuck by the terrain coming into contact with the bottom of the rover.
- Yellow – represents unknown terrain.
- White – the actual route that the system has evaluated as safe.
Projects not yet implemented or positioning on Mars in the future
At this point, for the sake of completeness, I will mention a system that we know well from our earthly conditions. It is satellite navigation, commonly called “GPS”, even though there are currently more available satellite positioning systems on Earth (GPS itself is only one of them, it is the American system “Global Positioning System” – NAVSTAR/GPS). But what about the use of such systems on another planet than here on Earth? It’s a good question that doesn’t have a complete answer yet. In the years 2012-2017, while I was still working in Košice, I worked on the project of the first concept of a satellite navigation system for Mars, and as part of the research on planetary conditions, my colleagues and I came across many factors that would have a certain influence on the operation of such a system, but the application itself system in operation would be possible and feasible based on the overall results of the research.
Research on a satellite positioning system on Mars itself is a complex project consisting of smaller sub-projects that require focus and detailed attention – and time and appropriate conditions are essential for this. Currently, there is a growing interest in the research of Mars by robotic means, and it is getting quite “busy” on Mars and its surroundings. The satellite positioning system has indisputable advantages. I will not name them here because there are really many of them. One, probably the most important for the scientific community, is certainly the radical reduction of various risks and thus the lower overall cost of many robotic missions. However, this post is not intended to promote one of the projects I am involved in, it is only appropriate to mention the satellite positioning system on Mars because logically this question comes to light with every new planned mission to Mars.
Will humans eventually be needed to control the movement of robotic probes on Mars?
Of course, the movement of the rover on the surface of Mars is by no means easy. Despite the application of complex technologies and processes, detailed control of the rover’s movement, calculation of predictions, and analysis is essential before any programmed instructions are remotely uploaded to the rover’s onboard computer. Because despite other robotic “inhabitants” of Mars, we can guarantee with certainty that none of these inhabitants can help on the spot (yet).
Author: Dr. Jozef Kozár
Tip:
[SK] Slovenskú verziu tohto článku nájdete na tomto odkaze.
This article was published also in the digital edition of the Slovak newspaper SME.
References:
[1] Squyres et al.: Exploration of Victoria Crater by the Mars Rover Opportunity; Science; Vol 324, Issue 5930; 22 May 2009; pp. 1058-1061; DOI: 10.1126/science.1170355;


